Исследователи из Университета Нотр-Дам успешно напечатали на 3D-принтере ройных четвероногих роботов, способных пересекать сложную местность и преодолевать препятствия на своем пути.
Ясмин Озкан-Айдын, инженер-робототехник и доцент кафедры электротехники в университете, стремился имитировать внутри роботов коллективное поведение муравьев, пчёл и птиц для решения задачи.
В исследовании изучалось, как создание физического соединения между отдельными роботами может повысить мобильность и возможности коллективной наземной системы. Например, если один робот сталкивается с препятствием, которое он не может преодолеть, остальные собираются вместе, чтобы коллективно решить проблему.
«Роботы с ножками могут перемещаться в сложных условиях, таких как пересечённая местность и ограниченное пространство, а использование конечностей обеспечивает эффективную поддержку тела, обеспечивает быструю маневренность и облегчает преодоление препятствий», - сказала она. «Однако роботы на ногах сталкиваются с уникальными проблемами мобильности в земных условиях, что приводит к снижению двигательной активности».
Исследователи все чаще черпают вдохновение в мире природы и поведении его обитателей для разработки воздушной и подводной робототехники для различных приложений. Однако разработка таких роботов, способных преодолевать сложные участки местности и преодолевать препятствия, является сложной задачей.
В частности, несколько исследователей стремились составить карту и имитировать поведение тех представителей животного царства, которые группируются в самоорганизующиеся коллективы, такие как колонии муравьев, стаи птиц и стаи рыб. Несмотря на попытки воспроизвести этот естественный коллективный разум, их стайные роботы часто управляются дистанционно или с помощью GPS, а не самоорганизуются.
3D-печать использовалась при создании роя роботов для морской среды еще в 2014 году в рамках проекта CoCoRo (Коллективные когнитивные роботы). В проекте приняли участие пять европейских университетов, а кульминацией его стало создание 40 напечатанных на 3D-принтере мини-подводных роботов, которые могли работать вместе для выполнения сложных задач.
Совсем недавно исследовательская группа из Гарвардского университета сделала еще один шаг вперед в этой области, сумев напечатать на 3D-принтере косяк мягких роботизированных рыб, способных плавать в сложных формах без помощи Wi-Fi или GPS. Самодостаточность роботов позволяет использовать их для приложений экологического мониторинга в морской среде, которая является недоступной для людей.
В настоящее время рои наземных роботов ограничены относительно простыми средами, что, по словам Ясмин, частично связано с отсутствием двигательных способностей для работы на сложной местности. Таким образом, в начале 2020 года она начала проводить исследования и эксперименты, чтобы воспроизвести самоорганизующееся поведение колоний и стай животных, чтобы улучшить возможности роя-ботов.
 Исследование Озкан-Айдын основано на предпосылке, что физическое соединение между отдельными роботами может повысить мобильность и возможности всей системы. По сути, если конкретная задача выходила за рамки возможностей одного робота, например, переносить объект, роботы физически соединялись бы друг с другом, чтобы сформировать большую многоногую систему, чтобы коллективно нести вес.
Исследование Озкан-Айдын основано на предпосылке, что физическое соединение между отдельными роботами может повысить мобильность и возможности всей системы. По сути, если конкретная задача выходила за рамки возможностей одного робота, например, переносить объект, роботы физически соединялись бы друг с другом, чтобы сформировать большую многоногую систему, чтобы коллективно нести вес.
«Когда муравьи собирают или транспортируют предметы, если кто-то сталкивается с препятствием, группа работает сообща, чтобы преодолеть это препятствие», - пояснила Озкан-Айдын. «Например, если на пути есть разрыв, они образуют мост, по которому другие муравьи могут перемещаться по нему - и это является источником вдохновения для исследования.
«С помощью робототехники мы можем лучше понять динамику и коллективное поведение этих биологических систем, а также узнать, как мы можем использовать этот вид технологий в будущем».
Чтобы создать свой рой, Озкан-Айдын использовала 3D-принтер для изготовления недорогих четвероногих роботов длиной от 15 до 20 см. Каждый робот был оснащен литий-полимерным аккумулятором, микроконтроллером и тремя датчиками. В дополнение к датчику освещенности спереди, каждый робот имел два магнитных датчика касания спереди и сзади, чтобы они могли присоединяться к другим в рою.
Каждый робот был напечатан на 3D-принтере с четырьмя гибкими ногами, что, по словам Озкан-Айдына, придало роботам уровень «механического интеллекта» и уменьшило потребность в дополнительных датчиках.
«Вам не нужны дополнительные датчики для обнаружения препятствий, потому что гибкость ног помогает роботу проходить мимо них», - сказала она. «Они могут проверить пробелы на пути, строя мост своими телами; перемещать предметы индивидуально; или соединяться, чтобы перемещать объекты вместе в разных типах сред».
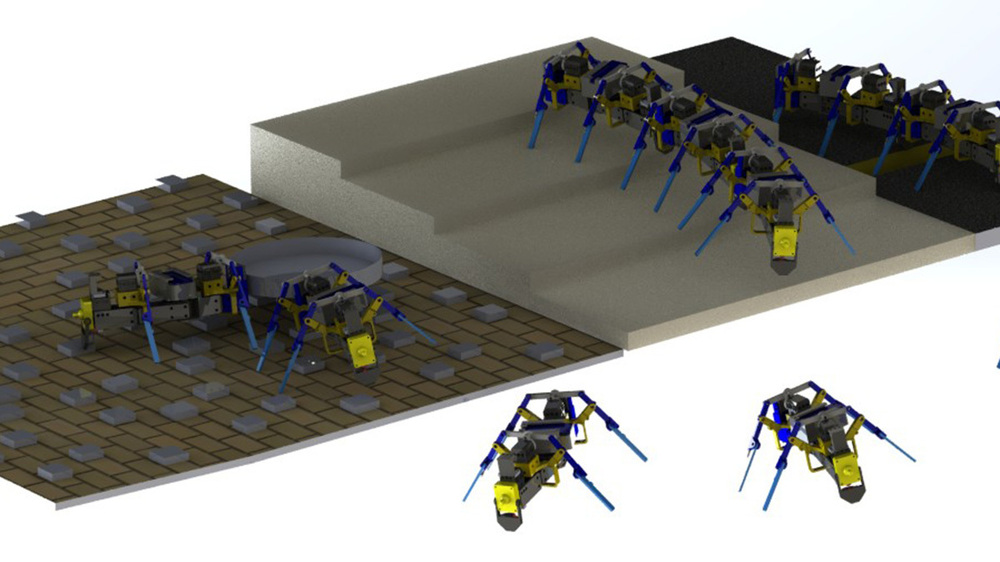
После 3D-печати каждого робота Озкан-Айдын проверила возможности роботов на местности, такой как трава, мульча и ковровое покрытие, а также в преодолении препятствий, таких как листья и желуди. Она проверила роботов на ровной поверхности на ДСП, а также построила лестницу с использованием изоляционной пены и деревянных блоков, которые послужили неровной местностью.
Когда отдельный робот застревал на препятствии, сигнал отправлялся другим роботам в рое. Затем они соединились вместе с помощью своих магнитных сенсорных датчиков, чтобы обеспечить поддержку и успешно преодолеть препятствие или местность.
Озкан-Айдын признает, что в конструкцию её роя роботов еще предстоит внести улучшения, но она считает, что исследование поможет разработать дизайн недорогого роя на ногах, который может адаптироваться к непредвиденным сценариям. Она предвидит, что её исследования помогут в разработке роевых роботов, способных выполнять реальные задачи, такие как поисково-спасательные операции, транспортировка объектов, мониторинг окружающей среды и даже исследование космоса.
Двигаясь вперед, Озкай-Айдын сосредотачивает свои исследования на улучшении возможностей контроля, восприятия и мощности роботизированной системы роя путём дальнейшего изучения коллективной динамики насекомых, таких как муравьи и термиты. Наряду с улучшением технологии аккумуляторов в роботах, будущая работа будет направлена на включение большего количества датчиков и более мощных двигателей при сохранении их небольших размеров.
«Для функциональных роевых систем необходимо усовершенствовать аккумуляторную технологию», - сказала она. «Нам нужны маленькие батареи, которые могут обеспечить большую мощность, в идеале - более 10 часов. В противном случае использование такого типа системы в реальном мире нецелесообразно. Вам нужно подумать о том, как роботы будут работать в реальном мире, поэтому вам нужно подумать о том, сколько энергии требуется, и какой размер батареи вы используете.
«ВСЕ ИМЕЕТ ОГРАНИЧЕНИЯ, ПОЭТОМУ НЕОБХОДИМО ПРИНИМАТЬ РЕШЕНИЯ ПО КАЖДОЙ ЧАСТИ МАШИНЫ».
Дополнительную информацию об исследовании можно найти в статье под названием «Самоконфигуируемые рои многоногих роботов, коллективно выполняющих сложные террадинамические задачи», опубликованную в журнале Science Robotics. Соавторами исследования являются Ю. Озкан-Айдын и Д. Гольдман.