Open Dynamic Robot Initiative (ODRI) разработала 3D-печатного робота с открытым исходным кодом, которым можно управлять удаленно через Wi-Fi.
Исследовательский проект начался как попытка построить недорогой модуль исполнительного механизма на основе бесщёточного двигателя, который можно было бы использовать для разработки различных типов роботов с регулируемым крутящим моментом. Разработанная уже около пяти лет платформа для разработки может быть объединена с 3D-печатью, дешевыми печатными платами и стандартными компонентами для создания нестандартных роботов на ножках за небольшую часть стоимости Boston Dynamics Spot (которая продается в розницу всего за 74 500 долларов).
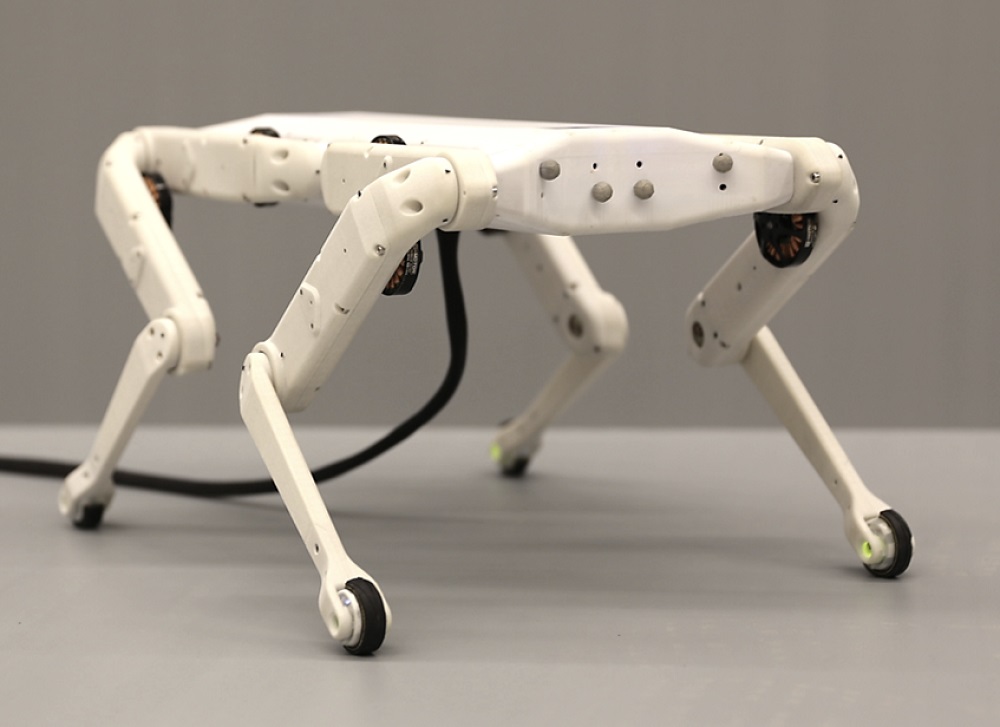
Модуль разработки ODRI уже был использован для создания 3D-печатной роботизированной собаки Solo и двуногого робота Bolt в стиле AT-ST.
ODRI - это совместный проект с открытым исходным кодом, возглавляемый несколькими научно-исследовательскими институтами, связанными с робототехникой: Motion Generation and Control Group, Институтом интеллектуальных систем Макса-Планка, Инженерной школой Тандона Нью-Йоркского университета и LAAS/CNRS (Лаборатория анализа и архитектуры систем, Франция).
Работа в конечном итоге направлена на удовлетворение потребностей исследовательского сообщества в области робототехники, где многие учреждения ищут гибкую исследовательскую платформу, которая была бы недорогой и легкой. Модуль разработки роботов ODRI в значительной степени можно напечатать на 3D-принтере и полностью модернизировать и модифицировать, предлагая доступный путь к передовым исследованиям и разработкам для команд робототехники с ограниченным бюджетом.
Согласно ODRI, его роботизированная платформа может использоваться для исследования движений конечностей животных по таким поверхностям, как гравий, почва, песок и грязь, а также для обучения с подкреплением для сложных форм поведения, таких как паркур. Некоторые из этих исследований были бы слишком рискованными для использования на дорогостоящей платформе. Кроме того, его также можно использовать для исследования движений, управляющих окружающей средой, таких как открытие дверей или нажатие кнопок, и интеграции с передовыми коммуникационными технологиями, такими как беспроводная связь 5G.
Несмотря на то, что платформа прошла долгий путь за эти годы, одним из последних нововведений является интеграция подключения к Wi-Fi. Алгоритмическое управление устройством с обратной связью фактически осуществляется на отдельном ПК, а не на бортовом компьютере. Все, что можно найти на корпусе робота, - это несколько бесщеточных двигателей постоянного тока, приводимых в действие полевыми модулями управления, беспроводной контроллер и батареи.
Для такого проекта, как правило, стандартной практикой является локальный расчет всех положений, крутящего момента и скорости с использованием датчиков ножек. Однако для локального расчета планирования движения требуется значительная локальная вычислительная мощность, что затрудняет разработку, так как вам придется разместить мощный ПК в пространстве, в которое мощные ПК еще не влезают, особенно если вы собираетесь запрограммировать устройство на выполнение сложных движений.
Благодаря минимальному количеству электроники и легким деталям, напечатанным на 3D-принтере, ODRI удалось довести Solo, вариант робота-собаки, до общей массы всего 2,2 кг с высотой бедра около 24 см.
Дополнительные сведения о модуле разработки роботов можно найти в статье под названием «Открытая модульная архитектура роботов с контролируемым крутящим моментом для исследования движения на ногах». Кроме того, файлы с открытым исходным кодом для робота можно найти в проекте GitHub.
В том же духе Джеймс Брутон из XRobots, инженер-робототехник и YouTube, занимающийся 3D-печатью, недавно начал работу над V3 своего 3D-печатного робота-собаки. Этот проект с открытым исходным кодом, получивший название openDog, работает уже пару лет, и, помимо двигателей, подшипников и некоторых других компонентов, его можно полностью напечатать в 3D на недорогой системе FDM, такой как LulzBot TAZ Workhorse Bruton.
В другом месте в сообществе разработчиков ПО с открытым исходным кодом компания YouTuber Teaching Tech недавно разработала и напечатала на 3D-принтере свою собственную версию с открытым исходным кодом редких старинных фрактальных тисков. Получившие название «самый крутой инструмент, о котором вы даже не подозревали», 100-летние фрактальные тиски практически невозможно купить в наши дни, и они способны трансформироваться, чтобы захватывать практически любой объект.