Исследователи из Сеульского национального университета (SNU) разработали новые датчики, печатаемые на 3D-принтере, которые позволяют людям удалённо взаимодействовать с деформируемыми системами мягкой робототехники.
Многофункциональные устройства, которые способны по желанию растягиваться и изгибаться в сложные формы, также обеспечивают возможности оптического, микрофлюидного и пьезорезистивного зондирования. Во время тестирования команда смогла интегрировать свои датчики как в носимые, так и в управляемые стимулами актуаторы, что позволило пользователям управлять несколькими роботизированными устройствами на расстоянии.
Уже были проведены значительные исследования, чтобы сделать роботизированные системы более интерактивными как с окружающей средой, так и с людьми. В первую очередь, эти исследования были сосредоточены на датчиках, которые позволяют реагировать на входные данные, такие как сопротивление или интенсивность света, но многие из них могут обнаруживать только один режим деформации за раз.
Хотя микрофлюидные и тканевые устройства показали себя многообещающими в этой области, они не могут различать разные типы, поскольку имеют только один чувствительный элемент. Учитывая, что один стимул может вызвать несколько деформационных реакций, создание более адаптируемого мягкого датчика является весьма желательным.
Были использованы различные подходы к созданию мультимодальной робототехники, включая встраивание жидкостных каналов или чувствительных элементов в эластомерные структуры. Однако физическое объединение датчиков в одну структуру часто влияло на их размер и увеличивало сложность процессов проектирования и изготовления.
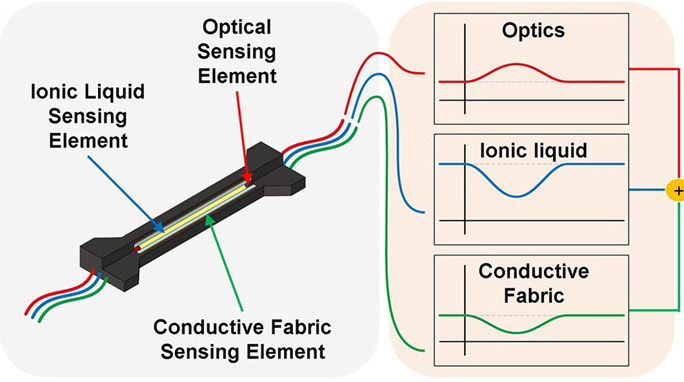
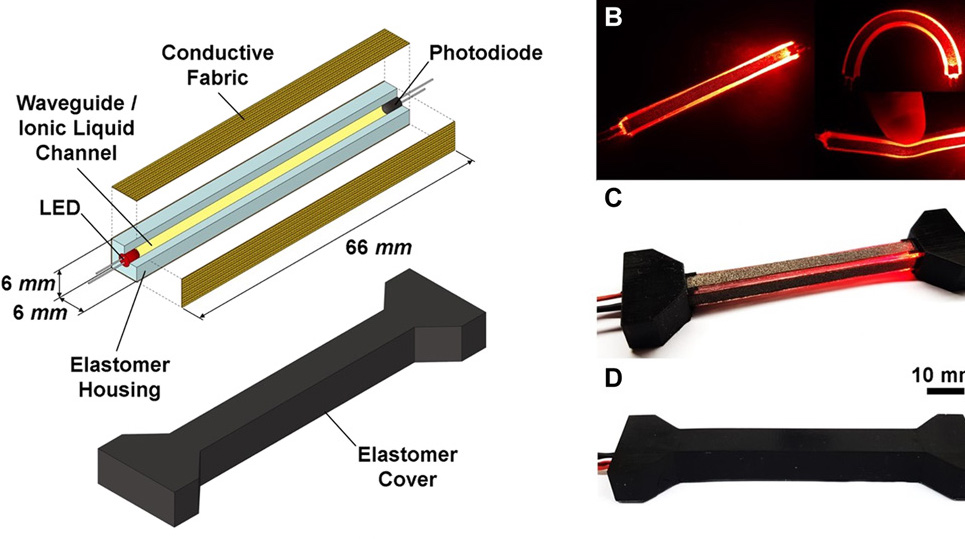
Чтобы преодолеть ограничения предыдущих проектов, команда напечатала в 3D многофункциональный датчик, способный обнаруживать отдельные режимы деформации и разделять их все одновременно. Само устройство имеет микрожидкостный канал, заполненный ионной жидкостью, эластомерный корпус и слой проводящей ткани.
Теоретически, когда конструкция подвергалась деформации, ее каналы действовали как датчик и изменяли ее электрическое сопротивление. Чтобы реализовать это на практике, исследователи подвергли свое устройство различным воздействиям и применили метод машинного обучения наряду с симуляциями для измерения его мультимодальных возможностей.
Датчик был изогнут относительно нейтральной оси вращающегося соединения перед приложением местного контактного давления для имитации растяжения, сжатия и изгиба. Результаты показали, что чувствительность сигналов устройства менялась в зависимости от места приложения давления, показывая, что устройство может реагировать на внешние раздражители.
Чтобы продемонстрировать потенциал своего сенсора в интерфейсах человек-робот, ученые построили два прототипа системы. Одно было носимым устройством, которое позволяло пользователям точно управлять БПЛА и роботизированной рукой, а другое - мягким роботизированным «запястьем», состоящим из четырех приводов, которое могло реагировать на внешние силы.
Хотя команда признала, что необходимы дальнейшие испытания, чтобы исключить этапы ручного производства, они считают свое устройство важным шагом вперед по сравнению с другими разработками. В будущем ученые считают, что их датчик может быть применен в более крупных роботах, предоставляя им до десяти различных возможностей восприятия.
Исследователи все чаще используют 3D-печать как средство изготовления мягких роботов с более сложным дизайном и расширенными функциональными возможностями, от ощущения и ходьбы до «потения».
Ученые из Технологического университета Чжэцзян, Тяньцзиньского университета, Нанкинского технологического института и Университета Рицумейкан разработали 3D-печатный мягкий роботизированный палец. Команда создала свою аддитивную цифровую модель в качестве доказательства концепции того, что изготовление из нескольких материалов может быть развернуто для упрощения процесса производства робототехники.
Тем временем исследователи из Корнельского университета напечатали на 3D-принтере мягкую роботизированную мышцу, способную контролировать свою внутреннюю температуру с помощью потоотделения. Мягкие, похожие на пальцы исполнительные механизмы позволяют не привязанным роботам работать в течение более длительных периодов времени без перегрева.
В другом месте команда из Калифорнийского университета в Сан-Диего развернула аддитивное производство для производства роботов, вдохновленных шагающими насекомыми. Боты с ограниченным бюджетом были разработаны, чтобы снизить стоимость решения для любителей и исследователей, которые стремятся войти в эту область.
Выводы исследователей подробно описаны в их статье под названием «Неоднородное восприятие в многофункциональном мягком сенсоре для интерфейсов человек-робот». Соавторами исследования стали Тхэкён Ким, Судонг Ли, Тэхва Хонг, Гёук Шин, Тэхван Ким и Пак Ён-Лэ.